










technologies utilisées
Temps de lecture :Les technologies mises en œuvre doivent tendre à simplifier les tâches de ceux qui les installent aussi bien que des exploitants qui les utilisent. Parmi les technologies les plus utilisées en traitement de l’eau, on trouve :
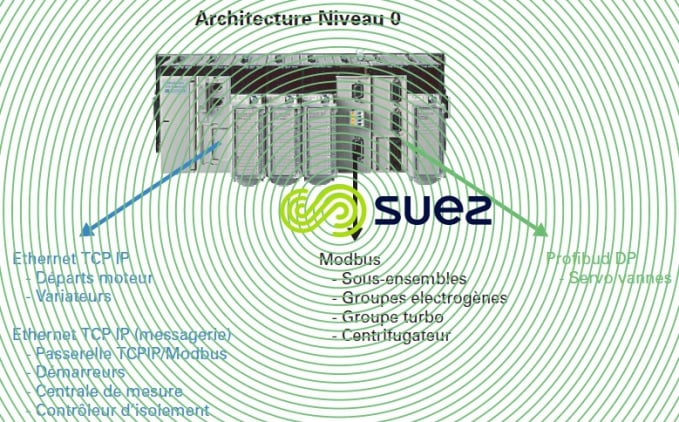
les réseaux de terrain (figure 10)
De plus en plus, les réseaux de terrain sont utilisés pour simplifier le câblage, donc diminuer les coûts d’installation, mais aussi pour simplifier la maintenance (diminution des borniers). Cette solution est très intéressante sur des procédés qui nécessitent des capteurs/actionneurs nombreux dans une zone géographique restreinte (inférieure à 50 m) : c’est typiquement le cas des skids d’ultrafiltration Degrémont® où un réseau de terrain relie les vannes automatiques à l’automate skid. De même, les stations de traitement d’eau potable et des stations d’eaux résiduaires par boues activées comportent beaucoup de départs moteurs, et il est intéressant d’installer cette solution pour réduire le câblage entre les armoires puissance, départs moteurs et les armoires automates.
Cette solution est aussi très intéressante pour les vannes motorisées. Elle permet de réduire considérablement le câblage entre les armoires et les équipements tout en conservant les mêmes fonctionnalités (marche/arrêt hors automate, mode distant et local…).
Sur des procédés type biofiltre, on utilise plutôt des entrée/sortie déportées. De même, le petit nombre de mesures et le fort étalement des stations par boues activées n’incitent pas à installer cette technologie pour les transmetteurs de débit, pression, niveau…
Les solutions proposées par les constructeurs d’automates et d’appareillage électromécanique s’étoffent et permettent de proposer des solutions fiables, industrielles, à moindre coût, pour de fonctionnalités supérieures (mesure de courant, cosinus phi…).

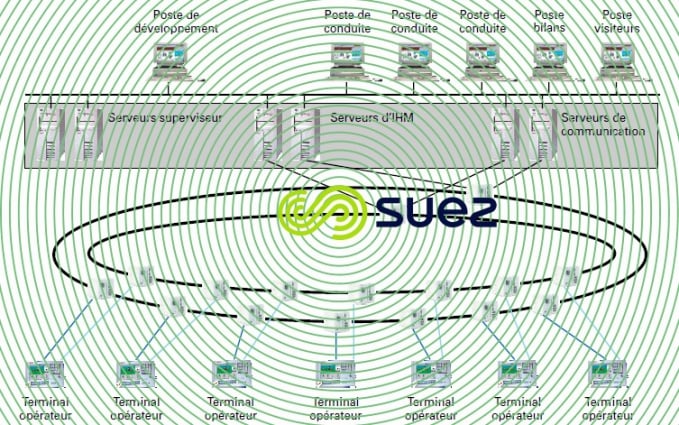
clients légers (voir architecture Valenton figures 11 et 12)
Les architectures du système de contrôle-commande doivent pouvoir évoluer avec les organisations et leurs évolutions nécessaires pour optimiser les ressources de l’exploitant.
Autant, il y a quelques années, modifier l’architecture d’un système de contrôle-commande était cher voire impossible, autant maintenant, avec les solutions « clients légers », l’exploitant a la possibilité de faire évoluer ses postes de travail et son organisation comme il le souhaite. Le SCC n’est plus un frein (poste en salle de contrôle, ou localement, à distance…), tout est réalisable simplement. Par exemple, l’ajout d’une IHM dans un atelier, sans modifier le reste du système est facilement réalisable.
De plus, cette solution permet d’optimiser le prix des licences installées en fonction du nombre d’interface homme-machine. Par exemple, sur le site de Valenton, une vingtaine de licences sont installées pour une soixantaine d’interface homme-machine.
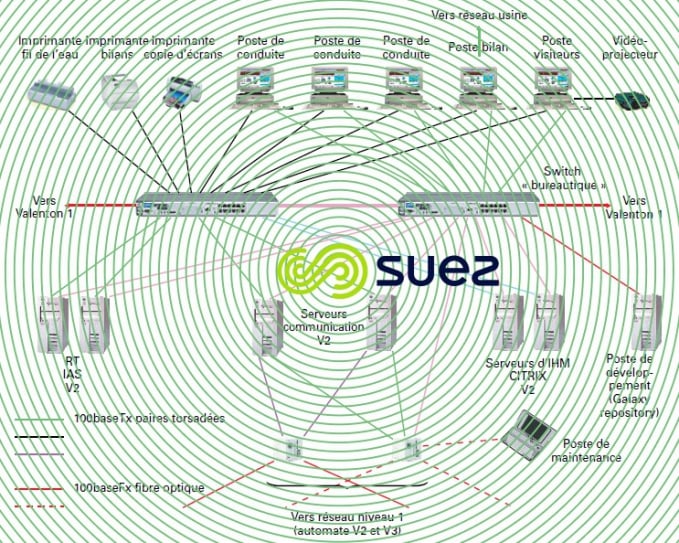
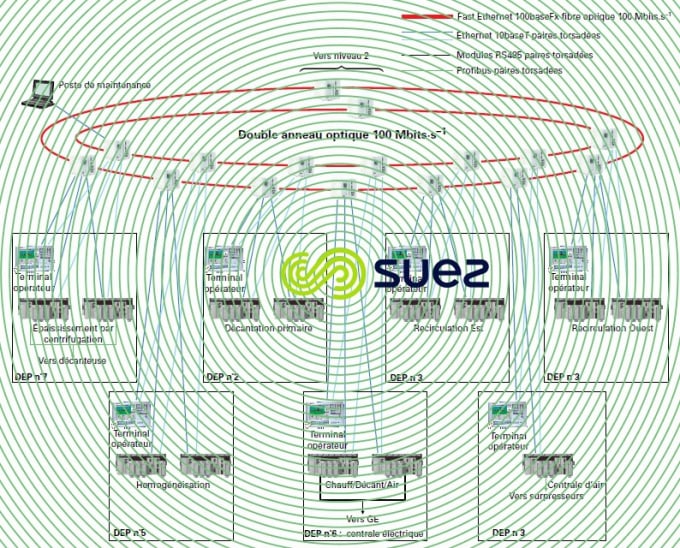
ethernet (voir architecture Valenton – figures 13 et 14)
Les technologies informatiques s’imposent dans le monde du contrôle-commande et c’est ainsi que les réseaux de communication inter-automates sont fondés sur des standards industriels reconnus type Ethernet TCP/IP.
Ce réseau permet de répondre à tous les types d’architecture, des plus simples jusqu’à des solutions à haute disponibilité, et ce, quelle que soit la taille des stations.
Le fait qu’Ethernet ne soit pas déterministe ne gêne pas. Vue la vitesse du réseau (supérieure à 100 Mb), il n’y a pas de pertes d’informations même en cas d’avalanche d’alarmes.

programmation orientée objet (figure 15)
Les technologies pour le hardware se banalisent. Il en est de même pour les logiciels.
Les consoles de programmation des automates ne sont plus des forteresses et s’ouvrent aussi au monde informatique. Les normes internationales, IEC 61131-3 entre autres, conçues par les constructeurs d’automates, permettent aujourd’hui de travailler avec des boîtes fonctionnelles qui facilitent la mise en œuvre et les essais.
Cette programmation orientée objet permet de standardiser les fonctions élémentaires en proposant plus de fonction et donc d’informations pour l’exploitant. À une fonction donnée dans l’automate correspond une fonction en supervision, et donc à des adresses automates correspondent des adresses en supervision. Cela facilite les tests et la maintenance.
C’est ainsi que, pour des fonctions type moteur, on peut prévoir toutes sortes de calculs, ceux-ci étant faits une fois pour toutes. Lors de la vie de la station, ces fonctions peuvent être réutilisées simplement pour des adjonctions de procédés ou des modifications.
Cette approche de programmation orientée objet combinée avec un découpage fonctionnel de l’usine permet de structurer le codage des adresses automate et donc de faciliter la maintenance.
système numérique de contrôle-commande ou solution automates superviseurs
C’est une des questions souvent soulevées. Sur les stations « classiques », le procédé est lent, les temps de réponse de quelques heures avec peu de mesures et donc peu de boucles de régulation et les séquences de fonctionnement sont de type combinatoires ou Graphcet (SFC). Il est donc logique que l’on se soit tourné vers la solution la plus adaptée à ces caractéristiques : les automates associés à une supervision.
SUEZ a ainsi réalisé des centaines d’installations à la satisfaction de ses clients. Cette solution a l’intérêt de s’interfacer facilement avec les équipements qui gèrent l’astreinte et permet de profiter rapidement des progrès réalisées par l’informatique (internet, clients légers…).
La solution automates superviseur a en plus l’énorme avantage d’être connue par beaucoup de prestataires pour sa mise en œuvre et sa maintenance.
Le SNCC apporte l’avantage de mieux structurer la programmation (utilisation de bloc fonctionnel en bibliothèque, variable déclarée globalement…) et de gérer les communications entre les interfaces homme- machine de façon transparente (déclaration unique des nœuds de réseaux). Mais les SNCC ne se justifient que pour des stations d’une certaine taille (plus de 10 000 variables en supervision).
En fait, les différences technologiques entre un SNCC et une solution automates/superviseur s’estompent, les deux offres sont maintenant fondées sur les mêmes standards :
- Windows ;
- Ethernet ;
- IEC 61131-3 pour la programmation du temps réel.
Le choix entre ces deux solutions se fera donc de plus en plus sur des critères humains (expérience de l’exploitant) ou sur des critères commerciaux (services, prix) plutôt que sur des critères techniques.
Outil Marque-page
Cliquez sur l'outil marque-page, puis surlignez le dernier paragraphe lu pour pouvoir poursuivre ultérieurement votre lecture.
